LEGILE CONSERVĂRII MOMENTULUI ȘI CUPLULUI
IMPULS
Scopul invatarii: realizarea unei înțelegeri a esenței fizice a legilor conservării momentului și a momentului unghiular. Pentru a insufla abilitățile de rezolvare independentă a problemelor folosind aceste legi.
Literatură
Principal: Detlaf A.A., Yavorsky B.M. curs de fizica. – M.: facultate, 1989.– Cap.5, § 5.1 – 5.3.
Adiţional: Saveliev I.V. Curs de fizica generala. - M.: Nauka, 1987. - V.1, cap.3, § 27 - 29.
Întrebări de control pentru pregătirea lecției
1. Ce se numește impulsul corpului? Impul de forță? Unitățile lor de măsură.
2. Formulați definiția unui sistem închis de corpuri.
3. Formulați și scrieți legea conservării impulsului pentru un sistem de corpuri?
4. Ce se numește factorul de recuperare? De ce depinde?
5. Ce se numește impact, impact elastic, impact inelastic?
6. Ce se numește momentul unghiular? Unitatea de măsură în SI.
7. Formulați și scrieți legea conservării impulsului pentru un sistem de corpuri și un singur corp. La ce sisteme se aplica?
Scurte informații teoretice și formule de bază
impulsul corpului numită mărime vectorială fizică egală cu produsul dintre masa corpului și viteza acestuia și având direcția vitezei 
Puls este o măsură a mișcării mecanice a unui corp cu o masă dată.
Pentru a schimba impulsul unui corp, trebuie să i se aplice o forță. Modificarea impulsului va depinde nu numai de mărimea forței, ci și de durata acțiunii acesteia.
Impulsul de forta numit vector cantitate fizica egal cu produsul forței și timpul acțiunii acesteia, adică.  .
.
Conceptul de impuls de forță este utilizat pe scară largă în rezolvarea problemelor de mișcare a mai multor corpuri care interacționează.
Un set de puncte materiale (corpuri) selectate mental care se deplasează conform legilor mecanicii clasice și interacționează între ele și cu corpuri care nu sunt incluse în acest set se numește sistem mecanic. Forțele de interacțiune dintre corpurile unui sistem mecanic se numesc interne. Forțele care interacționează cu corpurile din afara sistemului sunt numite externe.
Un sistem mecanic de corpuri asupra căruia nu acționează forțele externe  se numește închis sau izolat. Într-un sistem izolat, suma geometrică a impulsurilor corpurilor incluse în acesta rămâne constantă, adică
se numește închis sau izolat. Într-un sistem izolat, suma geometrică a impulsurilor corpurilor incluse în acesta rămâne constantă, adică
Legea conservării impulsului și-a găsit o aplicare largă în impactul corpurilor.
a sufla numită interacţiunea de scurtă durată a corpurilor rezultată din ciocnirea lor.
Atunci când corpurile se ciocnesc unele de altele, ele suferă deformare. În acest caz, energia cinetică pe care corpurile o aveau înainte de impact este convertită parțial sau complet în energia potențială de deformare elastică și în așa-numita energie internă a corpurilor.
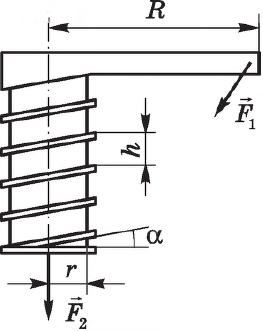
Pentru a ține cont de pierderile de energie se introduce un factor de recuperare, care depinde doar de proprietăți fizice materialul corpului. Este determinată de raportul dintre componentele normale (în raport cu suprafața de impact) a vitezei relative după impact  la valoarea sa înainte de impact
la valoarea sa înainte de impact  (fig.4.1):
(fig.4.1):

Se spune că impactul este perfect elastic. dacă, după impact, deformațiile apărute în corpuri dispar complet (energia cinetică a corpului înainte și după impact rămâne neschimbată, k = 1).
La  cadoul se numește absolut inelastic, dacă în urma impactului se păstrează complet deformațiile apărute în corpuri ( k= 0). După un impact perfect inelastic, corpurile se mișcă cu o viteză comună.
cadoul se numește absolut inelastic, dacă în urma impactului se păstrează complet deformațiile apărute în corpuri ( k= 0). După un impact perfect inelastic, corpurile se mișcă cu o viteză comună.
În cazul impactului central inelastic a două corpuri cu mase
 și
și  viteza totala
viteza totala  mișcarea acestor corpuri după impact poate fi determinată din legea conservării impulsului:
mișcarea acestor corpuri după impact poate fi determinată din legea conservării impulsului:
Unde  - viteza primului corp înainte de impact;
- viteza primului corp înainte de impact;  este viteza celui de-al doilea corp înainte de impact.
este viteza celui de-al doilea corp înainte de impact.
O parte din energia cinetică a corpurilor înainte de impact va merge la munca de deformare
Cu un impact central elastic, corpurile după impact se vor mișca cu viteze diferite. Viteza primului corp după impact

Viteza celui de-al doilea corp după impact

La rezolvarea problemelor de mecanică în sisteme neînchise, este posibil să se aplice legea conservării impulsului dacă:
a) acționează forțele externe, dar rezultanta acestor forțe este zero;
b) proiecția sumei tuturor forțelor externe pe o anumită direcție este egală cu zero, prin urmare, proiecția impulsului pe această direcție este păstrată, deși vectorul impuls în sine nu rămâne constant.
Momentul unghiular al unui corp față de o axă fixă este o mărime fizică vectorială egală cu produsul dintre momentul de inerție al corpului față de aceeași axă și viteza unghiulară a corpului:


Momentul de impuls al unui sistem de corpuri este suma vectorială a momentelor de impuls ale tuturor corpurilor sistemului

Legea conservării momentului unghiular: rezultă un moment al forțelor externe aplicate sistemului, egal cu zero  , atunci momentul unghiular al sistemului este o valoare constantă, adică
, atunci momentul unghiular al sistemului este o valoare constantă, adică

Pentru două corpuri:
Unde J 1 ,
J 2 ,
 ,
, – momentul de inerție și vitezele unghiulare ale corpurilor înainte de interacțiune;
– momentul de inerție și vitezele unghiulare ale corpurilor înainte de interacțiune;  sunt aceleași valori după interacțiune.
sunt aceleași valori după interacțiune.
Pentru un corp, al cărui moment de inerție poate varia:


Unde J 1 și J 2
sunt valorile inițiale și finale ale momentului de inerție;
 și
și
 este viteza unghiulară finală inițială a corpului.
este viteza unghiulară finală inițială a corpului.
În problemele din cursul general, fizicienii iau în considerare de obicei rotația unui corp rigid doar în jurul unei axe fixe sau a unei axe care se mișcă în spațiu paralel cu ea însăși. În acest caz, mărimile fizice care caracterizează mișcarea de rotație a corpului  îndreptată de-a lungul axei de rotație. Acest lucru face posibilă simplificarea scrierii ecuațiilor mișcării de rotație a corpului. Alegând axa de rotație ca axă de proiecție, toate ecuațiile pot fi scrise în formă scalară. În acest caz, semnele cantităților
,
,M, L
determinată după cum urmează. O anumită direcție de rotație (în sensul acelor de ceasornic sau în sens invers acelor de ceasornic) este aleasă ca pozitivă. Cantitati
,
L,M sunt luate cu semnul plus dacă direcția lor corespunde direcției pozitive alese, în caz contrar sunt luate cu semnul minus. Semn de mărime
se potrivește întotdeauna cu semnul M.
îndreptată de-a lungul axei de rotație. Acest lucru face posibilă simplificarea scrierii ecuațiilor mișcării de rotație a corpului. Alegând axa de rotație ca axă de proiecție, toate ecuațiile pot fi scrise în formă scalară. În acest caz, semnele cantităților
,
,M, L
determinată după cum urmează. O anumită direcție de rotație (în sensul acelor de ceasornic sau în sens invers acelor de ceasornic) este aleasă ca pozitivă. Cantitati
,
L,M sunt luate cu semnul plus dacă direcția lor corespunde direcției pozitive alese, în caz contrar sunt luate cu semnul minus. Semn de mărime
se potrivește întotdeauna cu semnul M.
Cu rotația accelerată a corpului, semnele tuturor celor patru cantități coincid; în mișcare lentă, două perechi de cantități - , Lși M, - au semne opuse.
O comparație a mărimilor și ecuațiilor de bază care determină mișcarea de rotație a corpului în jurul unei axe fixe și mișcarea de translație a acesteia, subliniind analogia lor, este dată în tabel. 4.1.
T a b l e 4.1
|
mișcare de translație |
mișcare de rotație |
|
Rezultatul forțelor externe
Ecuația de bază a dinamicii
|
Momentul total al forțelor externe este M Ecuația de bază a dinamicii:
|





1. După cum știți, rezultatul unei forțe depinde de modulul, punctul de aplicare și direcția acesteia. Într-adevăr, cu cât forța care acționează asupra corpului este mai mare, cu atât accelerația pe care o dobândește este mai mare. Direcția accelerației depinde și de direcția forței. Deci, aplicând o forță mică pe mâner, deschidem ușor ușa, dacă aceeași forță este aplicată lângă balamalele de care atârnă ușa, atunci s-ar putea să nu fie deschisă.
Experimentele și observațiile arată că rezultatul acțiunii unei forțe (interacțiune) depinde nu numai de modulul forței, ci și de timpul acțiunii acesteia. Să facem un experiment. Vom atârna o sarcină pe un trepied pe un fir, de care se leagă un alt fir de jos (Fig. 59). Dacă firul inferior este tras brusc, se va rupe, iar sarcina va rămâne atârnată de firul superior. Dacă acum trageți încet firul inferior, firul superior se va rupe.
Impulsul de forță se numește mărime fizică vectorială egală cu produsul forței și timpul acțiunii acesteia F t .
Unitatea de măsură a forței în SI - newton secundă (1 N s): [ft] = 1 N s.
Vectorul impuls forță coincide în direcție cu vectorul forță.
2. De asemenea, știți că rezultatul unei forțe depinde de masa corpului asupra căreia acționează forța. Deci, cu cât masa corpului este mai mare, cu atât mai puțină accelerație capătă sub acțiunea aceleiași forțe.
Luați în considerare un exemplu. Imaginați-vă că există o platformă încărcată pe șine. Un vagon care se deplasează cu o anumită viteză se ciocnește de el. Ca urmare a coliziunii, platforma va dobândi accelerație și se va deplasa pe o anumită distanță. Dacă un vagon care se deplasează cu aceeași viteză se ciocnește cu un vagon ușor, atunci, ca urmare a interacțiunii, se va deplasa la o distanță semnificativ mai mare decât o platformă încărcată.
Alt exemplu. Să presupunem că un glonț zboară până la țintă cu o viteză de 2 m/s. Cel mai probabil glonțul va sări de pe țintă, lăsând doar o mică adâncitură pe el. Dacă glonțul zboară cu o viteză de 100 m / s, atunci va străpunge ținta.
Astfel, rezultatul interacțiunii corpurilor depinde de masa și viteza lor.
Momentul unui corp este o mărime fizică vectorială egală cu produsul dintre masa corpului și viteza acestuia.
|
p = m v. |
Unitatea de măsură a impulsului unui corp în SI - kilogram metru pe secundă(1 kg m/s): [ p] = [m][v] = 1 kg 1m/s = 1 kg m/s.
Direcția impulsului corpului coincide cu direcția vitezei acestuia.
Impulsul este o mărime relativă, valoarea sa depinde de alegerea sistemului de referință. Acest lucru este de înțeles, deoarece viteza este o valoare relativă.
3. Să aflăm cum sunt legate impulsul forței și impulsul corpului.
Conform celei de-a doua legi a lui Newton:
F = ma.
Înlocuind în această formulă expresia pentru accelerație A= , obținem:
F= , sau
ft = mv – mv 0 .
În partea stângă a egalității se află impulsul forței; pe partea dreaptă a egalității - diferența dintre finală și inițială impulsurile corpului, t. e. modificarea impulsului corpului.
În acest fel,
impulsul forței este egal cu modificarea impulsului corpului.
|
F t =D( m v). |
Aceasta este o formulare diferită a celei de-a doua legi a lui Newton. Așa a spus Newton.
4. Să presupunem că două bile care se mișcă pe masă se ciocnesc. Se formează orice corp care interacționează, în acest caz bile sistem. Între corpurile sistemului acţionează forţe: forţa de acţiune F 1 și contraforță F 2. În același timp, forța de acțiune F 1 conform celei de-a treia legi a lui Newton este egală cu forța de reacție F 2 și este îndreptată opus acestuia: F 1 = –F 2 .
Se numesc forțele cu care corpurile sistemului interacționează între ele forțe interne.
Pe lângă forțele interne, forțele externe acționează asupra corpurilor sistemului. Deci, bilele care interacționează sunt atrase de Pământ, sunt afectate de forța de reacție a suportului. Aceste forțe sunt în acest caz forțe externe. În timpul mișcării, asupra bilelor acționează forța de rezistență a aerului și forța de frecare. Sunt și forțe externe în raport cu sistemul, care în acest caz este format din două bile.
Forțele externe sunt numite forțe care acționează asupra corpurilor sistemului din alte corpuri.
Vom lua în considerare un astfel de sistem de corpuri, care nu este afectat de forțele externe.
Un sistem închis este un sistem de corpuri care interacționează între ele și nu interacționează cu alte corpuri.
Într-un sistem închis, doar forțele interne acționează.
5. Luați în considerare interacțiunea a două corpuri care alcătuiesc un sistem închis. Masa primului corp m 1, viteza sa înainte de interacțiune v 01, după interacțiune v unu . Masa celui de-al doilea corp m 2, viteza sa înainte de interacțiune v 02, după interacțiune v 2 .
Forțele cu care corpurile interacționează, conform celei de-a treia legi: F 1 = –F 2. Timpul de acțiune al forțelor este așadar același
F 1 t = –F 2 t.
Pentru fiecare corp scriem a doua lege a lui Newton:
F 1 t = m 1 v 1 – m 1 v 01 , F 2 t = m 2 v 2 – m 2 v 02 .
Deoarece părțile din stânga ale egalităților sunt egale, părțile lor din dreapta sunt, de asemenea, egale, adică.
m 1 v 1 – m 1 v 01 = –(m 2 v 2 – m 2 v 02).
Transformând această egalitate, obținem:
|
m 1 v 01 + m 1 v 02 = m 2 v 1 + m 2 v 2 . |
În partea stângă a egalității este suma momentelor corpurilor înainte de interacțiune, în dreapta - suma momentului corpurilor după interacțiune. După cum se poate observa din această egalitate, impulsul fiecărui corp sa schimbat în timpul interacțiunii, în timp ce suma momentelor a rămas neschimbată.
Suma geometrică a impulsurilor corpurilor care alcătuiesc un sistem închis rămâne constantă pentru orice interacțiuni ale corpurilor acestui sistem.
Acesta este ce legea conservării impulsului.
6. Un sistem închis de corpuri este un model al unui sistem real. Nu există sisteme în natură care să nu fie afectate de forțele externe. Cu toate acestea, într-un număr de cazuri, sistemele de corpuri care interacționează pot fi considerate ca fiind închise. Acest lucru este posibil în următoarele cazuri: forțele interne sunt mult mai mari decât forțele externe, timpul de interacțiune este scurt, iar forțele externe se compensează reciproc. În plus, proiecția forțelor externe pe orice direcție poate fi egală cu zero și atunci legea de conservare a impulsului este îndeplinită pentru proiecțiile momentelor corpurilor care interacționează pe această direcție.
7. Exemplu de rezolvare a problemei
Două platforme de cale ferată se deplasează una spre alta cu viteze de 0,3 și 0,2 m/s. Greutățile platformelor sunt de 16 și respectiv 48 tone.Cu ce viteză și în ce direcție se vor mișca platformele după cuplarea automată?
|
Dat: |
SI |
Soluţie |
|
v 01 = 0,3 m/s v 02 = 0,2 m/s m 1 = 16 t m 2 = 48 t v 1 = v 2 = v |
v 02 = v 02 = 1,6104 kg 4,8104 kg |
Să descriem în figură direcția de mișcare a platformelor înainte și după interacțiune (Fig. 60). Forțele gravitaționale care acționează asupra platformelor și forțele de reacție ale suportului se compensează reciproc. Sistemul a două platforme poate fi considerat închis |
|
vx? |
și aplicați-i legea conservării impulsului.
m 1 v 01 + m 2 v 02 = (m 1 + m 2)v.
În proiecții pe axă X se poate scrie:
m 1 v 01X + m 2 v 02X = (m 1 + m 2)v x.
pentru că v 01X = v 01 ; v 02X = –v 02 ; v x = - v, apoi m 1 v 01 – m 2 v 02 = –(m 1 + m 2)v.
Unde v = – .
v= – = 0,75 m/s.
După cuplare, platformele se vor deplasa în direcția în care platforma cu o masă mai mare s-a deplasat înainte de interacțiune.
Răspuns: v= 0,75 m/s; îndreptată în direcţia de mişcare a căruciorului cu o masă mai mare.
Întrebări pentru autoexaminare
1. Ce se numește impulsul corpului?
2. Ce se numește impulsul forței?
3. Cum sunt legate impulsul unei forțe și schimbarea impulsului unui corp?
4. Ce sistem de corpuri se numește închis?
5. Formulați legea conservării impulsului.
6. Care sunt limitele de aplicabilitate ale legii conservării impulsului?
Sarcina 17
1. Care este impulsul unui corp de 5 kg care se deplasează cu o viteză de 20 m/s?
2. Determinați modificarea impulsului unui corp cu masa de 3 kg în 5 s sub acțiunea unei forțe de 20 N.
3. Determinați impulsul unui automobil cu masa de 1,5 tone care se deplasează cu viteza de 20 m/s într-un cadru de referință asociat cu: a) un automobil care este staționar față de Pământ; b) cu o mașină care se deplasează în aceeași direcție cu aceeași viteză; c) cu o mașină care se deplasează cu aceeași viteză, dar în sens opus.
4. Un băiat cu masa de 50 kg a sărit de pe o barcă staționară de 100 kg, aflată în apă lângă mal. Cu ce viteză s-a îndepărtat barca de țărm dacă viteza băiatului este orizontală și egală cu 1 m/s?
5. Un proiectil de 5 kg care zbura orizontal a explodat în două fragmente. Care este viteza proiectilului dacă un fragment cu masa de 2 kg a căpătat viteza de 50 m/s la rupere, iar un fragment cu masa de 3 kg a căpătat viteza de 40 m/s? Vitezele fragmentelor sunt direcționate orizontal.
impulsul corpului
Momentul unui corp este o mărime egală cu produsul dintre masa corpului și viteza acestuia.
De reținut că vorbim despre un corp care poate fi reprezentat ca punct material. Elanul unui corp ($p$) se mai numește și impulsul. Conceptul de impuls a fost introdus în fizică de René Descartes (1596-1650). Termenul „impuls” a apărut mai târziu (impulsus în latină înseamnă „împingere”). Momentul este o mărime vectorială (cum ar fi viteza) și este exprimată prin formula:
$p↖(→)=mυ↖(→)$
Direcția vectorului impuls coincide întotdeauna cu direcția vitezei.
Unitatea SI de impuls este impulsul unui corp cu o masă de $1$ kg care se mișcă cu o viteză de $1$ m/s, prin urmare, unitatea de impuls este $1$ kg $·$ m/s.
Dacă o forță constantă acționează asupra unui corp (punct material) în intervalul de timp $∆t$, atunci și accelerația va fi constantă:
$a↖(→)=((υ_2)↖(→)-(υ_1)↖(→))/(∆t)$
unde, $(υ_1)↖(→)$ și $(υ_2)↖(→)$ sunt vitezele inițiale și finale ale corpului. Înlocuind această valoare în expresia celei de-a doua legi a lui Newton, obținem:
$(m((υ_2)↖(→)-(υ_1)↖(→)))/(∆t)=F↖(→)$
Deschizând parantezele și folosind expresia pentru impulsul corpului, avem:
$(p_2)↖(→)-(p_1)↖(→)=F↖(→)∆t$
Aici $(p_2)↖(→)-(p_1)↖(→)=∆p↖(→)$ este modificarea impulsului în timp $∆t$. Atunci ecuația anterioară devine:
$∆p↖(→)=F↖(→)∆t$
Expresia $∆p↖(→)=F↖(→)∆t$ este o reprezentare matematică a celei de-a doua legi a lui Newton.
Produsul unei forțe și durata ei se numește impuls de forță. De aceea modificarea impulsului unui punct este egală cu modificarea impulsului forței care acționează asupra acestuia.
Expresia $∆p↖(→)=F↖(→)∆t$ se numește ecuația mișcării corpului. Trebuie remarcat faptul că aceeași acțiune - o modificare a impulsului unui punct - poate fi obținută printr-o forță mică pe o perioadă lungă de timp și mare putere pentru o perioadă scurtă de timp.
Impulsul sistemului tel. Legea schimbării impulsului
Impulsul (impulsul) unui sistem mecanic este un vector egal cu suma impulsurilor tuturor punctelor materiale ale acestui sistem:
$(p_(syst))↖(→)=(p_1)↖(→)+(p_2)↖(→)+...$
Legile schimbării și conservării impulsului sunt o consecință a celei de-a doua și a treia legi a lui Newton.
Luați în considerare un sistem format din două corpuri. Forțele ($F_(12)$ și $F_(21)$ din figură, cu care corpurile sistemului interacționează între ele, se numesc interne.
Fie ca, pe lângă forțele interne, forțele externe $(F_1)↖(→)$ și $(F_2)↖(→)$ acționează asupra sistemului. Pentru fiecare corp se poate scrie ecuația $∆p↖(→)=F↖(→)∆t$. Adăugând părțile din stânga și din dreapta acestor ecuații, obținem:
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_(12))↖(→)+(F_(21))↖(→)+(F_1)↖(→)+ (F_2)↖(→))∆t$
Conform celei de-a treia legi a lui Newton $(F_(12))↖(→)=-(F_(21))↖(→)$.
Prin urmare,
$(∆p_1)↖(→)+(∆p_2)↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$
În partea stângă se află suma geometrică a modificărilor impulsului tuturor corpurilor sistemului, egală cu modificarea impulsului sistemului însuși - $(∆p_(syst))↖(→)$. Având în vedere acest lucru , egalitatea $(∆p_1)↖(→)+(∆p_2) ↖(→)=((F_1)↖(→)+(F_2)↖(→))∆t$ poate fi scrisă:
$(∆p_(sys))↖(→)=F↖(→)∆t$
unde $F↖(→)$ este suma tuturor forțelor externe care acționează asupra corpului. Rezultatul obținut înseamnă că numai forțele externe pot modifica impulsul sistemului, iar modificarea impulsului sistemului este direcționată în același mod ca și forța externă totală. Aceasta este esența legii schimbării în impulsul unui sistem mecanic.
Forțele interne nu pot schimba impulsul total al sistemului. Ele schimbă doar impulsurile corpurilor individuale ale sistemului.
Legea conservării impulsului
Din ecuația $(∆p_(syst))↖(→)=F↖(→)∆t$ urmează legea conservării impulsului. Dacă asupra sistemului nu acționează forțe externe, atunci partea dreaptă a ecuației $(∆p_(syst))↖(→)=F↖(→)∆t$ dispare, ceea ce înseamnă că impulsul total al sistemului rămâne neschimbat. :
$(∆p_(sys))↖(→)=m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=const$
Se numește un sistem asupra căruia nu acționează forțe externe sau rezultanta forțelor externe este egală cu zero închis.
Legea conservării impulsului spune:
Momentul total al unui sistem închis de corpuri rămâne constant pentru orice interacțiune a corpurilor sistemului între ele.
Rezultatul obţinut este valabil pentru un sistem care conţine un număr arbitrar de corpuri. Dacă suma forțelor externe nu este egală cu zero, dar suma proiecțiilor lor pe o anumită direcție este egală cu zero, atunci proiecția impulsului sistemului pe această direcție nu se modifică. Deci, de exemplu, un sistem de corpuri de pe suprafața Pământului nu poate fi considerat închis din cauza forței gravitaționale care acționează asupra tuturor corpurilor, cu toate acestea, suma proiecțiilor impulsurilor pe direcția orizontală poate rămâne neschimbată (în absență de frecare), deoarece în această direcție forța gravitației nu este valabilă.
Propulsie cu reacție
Luați în considerare exemple care confirmă validitatea legii conservării impulsului.
Să luăm un balon de cauciuc pentru copii, să-l umflem și să-l dăm drumul. Vom vedea că atunci când aerul începe să iasă dintr-o direcție, balonul însuși va zbura în cealaltă direcție. Mișcarea mingii este un exemplu de propulsie cu reacție. Se explică prin legea conservării impulsului: impulsul total al sistemului „minge plus aer în ea” înainte de scurgerea aerului este zero; trebuie să rămână egal cu zero în timpul mișcării; prin urmare, bila se mișcă în direcția opusă direcției de ieșire a jetului și cu o astfel de viteză încât impulsul său este egal în valoare absolută cu impulsul jetului de aer.
propulsie cu reacție numită mișcarea unui corp care are loc atunci când o parte a acestuia se separă de el cu o anumită viteză. Datorită legii conservării impulsului, direcția de mișcare a corpului este opusă direcției de mișcare a părții separate.
Zborurile cu rachete se bazează pe principiul propulsiei cu reacție. Modern rachetă spațială este o aeronavă foarte complexă. Masa rachetei este suma masei fluidului de lucru (adică gazele fierbinți rezultate din arderea combustibilului și ejectate sub formă de jet) și masa finală sau, după cum se spune, „uscata” a rachetei, rămânând după ejectarea fluidului de lucru din rachetă.
Atunci când un jet de gaz reactiv este aruncat dintr-o rachetă cu viteză mare, racheta însăși se repezi în direcția opusă. Conform legii conservării impulsului, impulsul $m_(p)υ_p$ dobândit de rachetă trebuie să fie egal cu impulsul $m_(gaz) υ_(gaz)$ al gazelor ejectate:
$m_(p)υ_p=m_(gaz) υ_(gaz)$
Rezultă că viteza rachetei
$υ_p=((m_(gaz))/(m_p)) υ_(gaz)$
Din această formulă se poate observa că, cu cât viteza gazelor ejectate este mai mare și cu atât este mai mare raportul dintre masa fluidului de lucru (adică masa combustibilului) și masa finală ("uscata") a rachetei, viteza rachetei este mai mare.
Formula $υ_p=((m_(gaz))/(m_p))·υ_(gaz)$ este aproximativă. Nu ia în considerare faptul că pe măsură ce combustibilul arde, masa rachetei zburătoare devine din ce în ce mai mică. Formula exactă pentru viteza unei rachete a fost obținută în 1897 de K. E. Tsiolkovsky și îi poartă numele.
Munca de forță
Termenul „muncă” a fost introdus în fizică în 1826 de către omul de știință francez J. Poncelet. Dacă în viața de zi cu zi numai munca umană se numește muncă, atunci în fizică și, în special, în mecanică, este general acceptat că munca se face cu forța. Cantitatea fizică de muncă este de obicei indicată cu litera $A$.
Munca de forță- aceasta este o măsură a acțiunii unei forțe, în funcție de modulul și direcția acesteia, precum și de deplasarea punctului de aplicare a forței. Pentru forță constantă și mișcare rectilinie munca este definită de egalitatea:
$A=F|∆r↖(→)|cosα$
unde $F$ este forța care acționează asupra corpului, $∆r↖(→)$ este deplasarea, $α$ este unghiul dintre forță și deplasare.

Lucrul forței este egal cu produsul modulelor de forță și deplasare și cosinusul unghiului dintre ele, i.e. produs punctual vectorii $F↖(→)$ și $∆r↖(→)$.
Munca este o mărime scalară. Dacă $α 0$, iar dacă $90°
Când mai multe forțe acționează asupra unui corp, munca totală (suma muncii tuturor forțelor) este egală cu munca forței rezultate.
Unitatea de lucru SI este joule($1$ J). $1$ J este munca efectuată de o forță de $1$ N pe o cale de $1$ m în direcția acestei forțe. Această unitate este numită după omul de știință englez J. Joule (1818-1889): $1$ J = $1$ N $·$ m. Kilojulii și milijoulii sunt, de asemenea, adesea folosiți: $1$ kJ $= 1.000$ J, $1$ mJ $ = 0,001 $ J.
Lucrarea gravitației
Să considerăm un corp care alunecă de-a lungul unui plan înclinat cu un unghi de înclinare $α$ și o înălțime $H$.

Exprimăm $∆x$ în termeni de $H$ și $α$:
$∆x=(H)/(sinα)$
Considerând că gravitația $F_т=mg$ formează un unghi ($90° - α$) cu direcția de mișcare, folosind formula $∆x=(H)/(sin)α$, obținem o expresie pentru lucrul gravitației $A_g$:
$A_g=mg cos(90°-α)(H)/(sinα)=mgH$
Din această formulă se poate observa că munca gravitației depinde de înălțime și nu depinde de unghiul de înclinare al planului.
Din aceasta rezultă că:
- munca gravitației nu depinde de forma traiectoriei de-a lungul căreia se mișcă corpul, ci doar de poziția inițială și finală a corpului;
- când un corp se mișcă pe o traiectorie închisă, munca gravitației este zero, adică gravitația este o forță conservativă (forțele care au această proprietate se numesc conservatoare).
Lucrarea forțelor de reacție, este zero deoarece forța de reacție ($N$) este direcționată perpendicular pe deplasarea $∆x$.
Lucrul forței de frecare
Forța de frecare este îndreptată opus deplasării $∆x$ și formează cu ea un unghi $180°$, deci munca forței de frecare este negativă:
$A_(tr)=F_(tr)∆x cos180°=-F_(tr) ∆x$
Deoarece $F_(tr)=μN, N=mg cosα, ∆x=l=(H)/(sinα),$ atunci
$A_(tr)=μmgHctgα$
Lucrul forței elastice
Fie ca o forță exterioară $F↖(→)$ să acționeze asupra unui arc neîntins de lungime $l_0$, întinzându-l cu $∆l_0=x_0$. In pozitia $x=x_0F_(control)=kx_0$. După terminarea forţei $F↖(→)$ în punctul $x_0$, arcul este comprimat sub acţiunea forţei $F_(control)$.

Să determinăm lucrul forței elastice atunci când coordonatele capătului drept al arcului se schimbă de la $х_0$ la $х$. Deoarece forța elastică din această zonă se modifică liniar, în legea lui Hooke, valoarea sa medie în această zonă poate fi utilizată:
$F_(ex.av.)=(kx_0+kx)/(2)=(k)/(2)(x_0+x)$
Atunci lucrarea (ținând cont de faptul că direcțiile $(F_(exp.av.))↖(→)$ și $(∆x)↖(→)$ coincid) este egală cu:
$A_(exercițiu)=(k)/(2)(x_0+x)(x_0-x)=(kx_0^2)/(2)-(kx^2)/(2)$
Se poate arăta că forma ultimei formule nu depinde de unghiul dintre $(F_(exp.av.))↖(→)$ și $(∆x)↖(→)$. Munca fortelor elastice depinde numai de deformatiile arcului in starea initiala si finala.
Astfel, forța elastică, ca și gravitația, este o forță conservativă.
Puterea forței
Puterea este o mărime fizică măsurată prin raportul dintre muncă și perioada de timp în care este produsă.
Cu alte cuvinte, puterea arată cât de mult se lucrează pe unitatea de timp (în SI, pentru $1$ s).
Puterea este determinată de formula:
unde $N$ este puterea, $A$ este munca efectuată în timpul $∆t$.
Înlocuind $A=F|(∆r)↖(→)|cosα$ în formula $N=(A)/(∆t)$ în locul lucrării $A$, obținem:
$N=(F|(∆r)↖(→)|cosα)/(∆t)=Fυcosα$
Puterea este egală cu produsul dintre modulele vectorilor forță și viteză și cosinusul unghiului dintre acești vectori.
Puterea din sistemul SI este măsurată în wați (W). Un watt ($1$ W) este puterea la care se efectuează $1$ J de lucru în $1$ s: $1$ W $= 1$ J/s.
Această unitate poartă numele inventatorului englez J. Watt (Watt), care a construit primul motor cu abur. Însuși J. Watt (1736-1819) a folosit o unitate diferită de putere - cai putere (CP), pe care a introdus-o pentru a putea compara performanța unui motor cu abur și a unui cal: $ 1 $ CP. $= 735,5 $ mar.
În tehnologie, sunt adesea folosite unități mai mari de putere - kilowați și megawați: $1$ kW $= 1000$ W, $1$ MW $= 1000000$ W.
Energie kinetică. Legea modificării energiei cinetice
Dacă un corp sau mai multe corpuri care interacționează (un sistem de corpuri) pot lucra, atunci ei spun că au energie.
Cuvântul „energie” (din greacă. energia – acțiune, activitate) este adesea folosit în viața de zi cu zi. Deci, de exemplu, oamenii care pot lucra rapid se numesc energici, cu o mare energie.
Energia deținută de un corp datorită mișcării se numește energie cinetică.
Ca și în cazul definiției energiei în general, putem spune despre energia cinetică că energia cinetică este capacitatea unui corp în mișcare de a lucra.
Să aflăm energia cinetică a unui corp de masă $m$ care se mișcă cu o viteză de $υ$. Deoarece energia cinetică este energia datorată mișcării, starea zero pentru aceasta este starea în care corpul este în repaus. După ce am găsit munca necesară pentru a comunica corpului o viteză dată, vom găsi energia cinetică a acestuia.
Pentru aceasta, calculăm munca efectuată pe secțiunea de deplasare $∆r↖(→)$ când direcțiile vectorilor forțe $F↖(→)$ și deplasarea $∆r↖(→)$ coincid. În acest caz, munca este
unde $∆x=∆r$

Pentru mișcarea unui punct cu accelerația $α=const$, expresia pentru mișcare are forma:
$∆x=υ_1t+(la^2)/(2),$
unde $υ_1$ este viteza inițială.
Înlocuind expresia pentru $∆x$ din $∆x=υ_1t+(at^2)/(2)$ în ecuația $A=F ∆x$ și folosind a doua lege a lui Newton $F=ma$, obținem:
$A=ma(υ_1t+(at^2)/(2))=(mat)/(2)(2υ_1+at)$
Exprimând accelerația în termeni de viteze inițiale $υ_1$ și finale $υ_2$ $a=(υ_2-υ_1)/(t)$ și înlocuirea în $A=ma(υ_1t+(at^2)/(2))=( mat)/ (2)(2υ_1+at)$ avem:
$A=(m(υ_2-υ_1))/(2) (2υ_1+υ_2-υ_1)$
$A=(mυ_2^2)/(2)-(mυ_1^2)/(2)$
Acum echivalând viteza inițială cu zero: $υ_1=0$, obținem o expresie pentru energie kinetică:
$E_K=(mυ)/(2)=(p^2)/(2m)$
Astfel, un corp în mișcare are energie cinetică. Această energie este egală cu munca care trebuie făcută pentru a crește viteza corpului de la zero la $υ$.
Din $E_K=(mυ)/(2)=(p^2)/(2m)$ rezultă că munca unei forțe pentru a muta un corp dintr-o poziție în alta este egală cu modificarea energiei cinetice:
$A=E_(K_2)-E_(K_1)=∆E_K$
Egalitatea $A=E_(K_2)-E_(K_1)=∆E_K$ exprimă teorema privind modificarea energiei cinetice.
Modificarea energiei cinetice a corpului(punct material) pentru o anumită perioadă de timp este egală cu munca efectuată în acest timp de forța care acționează asupra corpului.
Energie potențială
Energia potențială este energia determinată de aranjarea reciprocă a corpurilor sau părților aceluiași corp care interacționează.
Deoarece energia este definită ca abilitatea unui corp de a lucra, energia potențială este definită în mod natural ca munca unei forțe care depinde doar de poziția relativă a corpurilor. Aceasta este munca gravitației $A=mgh_1-mgh_2=mgH$ și munca elasticității:
$A=(kx_0^2)/(2)-(kx^2)/(2)$
Energia potențială a corpului interacțiunea cu Pământul se numește valoarea egală cu produsul dintre masa $m$ a acestui corp și accelerația de cădere liberă $g$ și înălțimea $h$ a corpului deasupra suprafeței Pământului:
Energia potențială a unui corp deformat elastic este valoarea egală cu jumătate din produsul dintre coeficientul de elasticitate (rigiditatea) $k$ al corpului și pătratul deformației $∆l$:
$E_p=(1)/(2)k∆l^2$
Lucrarea forțelor conservatoare (gravitație și elasticitate), ținând cont de $E_p=mgh$ și $E_p=(1)/(2)k∆l^2$, se exprimă astfel:
$A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$
Această formulă ne permite să oferim o definiție generală a energiei potențiale.
Energia potențială a sistemului este o mărime care depinde de poziția corpurilor, a cărei schimbare în timpul tranziției sistemului de la starea inițială la starea finală este egală cu munca forțelor conservatoare interne ale sistemului, luate cu semnul opus.
Semnul minus din partea dreaptă a ecuației $A=E_(p_1)-E_(p_2)=-(E_(p_2)-E_(p_1))=-∆E_p$ înseamnă că atunci când munca este efectuată de forțe interne ( de exemplu, căderea corpului la pământ sub acțiunea gravitației în sistemul „piatră-Pământ”), energia sistemului scade. Munca și schimbarea energiei potențiale într-un sistem au întotdeauna semne opuse.
Întrucât munca determină doar modificarea energiei potențiale, atunci sens fizicîn mecanică are doar o schimbare de energie. Prin urmare, alegerea nivelului de energie zero este arbitrară și este determinată numai de considerente de comoditate, de exemplu, ușurința de a scrie ecuațiile corespunzătoare.
Legea schimbării și conservării energiei mecanice
Energia mecanică totală a sistemului suma energiilor sale cinetice și potențiale se numește:
Este determinată de poziția corpurilor (energia potențială) și viteza acestora (energia cinetică).
Conform teoremei energiei cinetice,
$E_k-E_(k_1)=A_p+A_(pr),$
unde $А_р$ este munca forțelor potențiale, $А_(pr)$ este munca forțelor nepotențiale.
La rândul său, munca forțelor potențiale este egală cu diferența de energie potențială a corpului în stările inițiale $E_(p_1)$ și finale $E_p$. Având în vedere acest lucru, obținem o expresie pentru legea schimbarii energiei mecanice:
$(E_k+E_p)-(E_(k_1)+E_(p_1))=A_(pr)$
unde partea stângă a egalității este modificarea energiei mecanice totale, iar partea dreaptă este opera forțelor nepotențiale.
Asa de, legea schimbarii energiei mecanice citeste:
Modificarea energiei mecanice a sistemului este egală cu munca tuturor forțelor nepotențiale.
Un sistem mecanic în care acționează numai forțe potențiale se numește conservator.
Într-un sistem conservator $A_(pr) = 0$. asta implică legea conservării energiei mecanice:
Într-un sistem conservator închis, energia mecanică totală este conservată (nu se modifică în timp):
$E_k+E_p=E_(k_1)+E_(p_1)$
Legea conservării energiei mecanice este derivată din legile mecanicii newtoniene, care sunt aplicabile unui sistem de puncte materiale (sau macroparticule).
Totuși, legea conservării energiei mecanice este valabilă și pentru un sistem de microparticule, unde legile lui Newton în sine nu se mai aplică.
Legea conservării energiei mecanice este o consecință a omogenității timpului.
Uniformitatea timpului este că, în aceleași condiții inițiale, cursul proceselor fizice nu depinde de momentul în care se creează aceste condiții.
Legea conservării energiei mecanice totale înseamnă că atunci când energia cinetică dintr-un sistem conservator se modifică, energia sa potențială trebuie să se schimbe și ea, astfel încât suma lor să rămână constantă. Aceasta înseamnă posibilitatea de a converti un tip de energie în altul.
În conformitate cu diferitele forme de mișcare a materiei, luați în considerare tipuri diferite energie: mecanică, internă (egală cu suma energiei cinetice a mișcării haotice a moleculelor în raport cu centrul de masă al corpului și energia potențială a interacțiunii moleculelor între ele), electromagnetică, chimică (care este suma energiei cinetice a mișcării electronilor și a energiei electrice a interacțiunii lor între ei și cu nuclee atomice), nucleare etc. Din cele spuse, este clar că împărțirea energiei în tipuri diferite destul de condiționat.
Fenomenele naturale sunt de obicei însoțite de transformarea unui tip de energie în altul. Deci, de exemplu, frecarea părților diferitelor mecanisme duce la conversia energiei mecanice în căldură, adică în energie interna.În motoarele termice, dimpotrivă, are loc o transformare energie internaîn mecanică în celulele galvanice, energia chimică este transformată în energie electrică etc.
În prezent, conceptul de energie este unul dintre conceptele de bază ale fizicii. Acest concept este indisolubil legat de ideea transformării unei forme de mișcare în alta.
Iată cum este formulat conceptul de energie în fizica modernă:
Energia este o măsură cantitativă generală a mișcării și interacțiunii tuturor tipurilor de materie. Energia nu ia naștere din nimic și nu dispare, ea poate trece doar de la o formă la alta. Conceptul de energie leagă împreună toate fenomenele naturii.
mecanisme simple. eficienta mecanismului
Mecanismele simple sunt dispozitive care modifică amploarea sau direcția forțelor aplicate corpului.
Sunt folosite pentru a muta sau ridica încărcături mari cu puțin efort. Acestea includ pârghia și varietățile sale - blocuri (mobile și fixe), o poartă, un plan înclinat și varietățile sale - o pană, un șurub etc.
Maneta. Regula pârghiei
Pârghia este un corp rigid capabil să se rotească în jurul unui suport fix.

Regula efectului de pârghie spune:
O pârghie este în echilibru dacă forțele aplicate acesteia sunt invers proporționale cu brațele lor:
$(F_2)/(F_1)=(l_1)/(l_2)$
Din formula $(F_2)/(F_1)=(l_1)/(l_2)$, aplicându-i proprietatea proporției (produsul termenilor extremi ai proporției este egal cu produsul termenilor ei medii), vom se poate obtine urmatoarea formula:
Dar $F_1l_1=M_1$ este momentul forței care tinde să rotească maneta în sensul acelor de ceasornic, iar $F_2l_2=M_2$ este momentul forței care tinde să rotească pârghia în sens invers acelor de ceasornic. Astfel, $M_1=M_2$, ceea ce urma să fie demonstrat.
Pârghia a început să fie folosită de oameni în cele mai vechi timpuri. Cu ajutorul acestuia, a fost posibilă ridicarea plăcilor grele de piatră în timpul construcției piramidelor în Egiptul antic. Fără pârghie, acest lucru nu ar fi fost posibil. Într-adevăr, de exemplu, pentru construcția piramidei lui Keops, care are o înălțime de 147$ m, s-au folosit peste două milioane de blocuri de piatră, dintre care cel mai mic avea o masă de $2,5$ tone!
În zilele noastre, pârghiile sunt utilizate pe scară largă atât în producție (de exemplu, macarale), cât și în viața de zi cu zi (foarfece, tăietori de sârmă, cântare).
Bloc fix
Acțiunea unui bloc fix este similară cu acțiunea unei pârghii cu pârghie egală: $l_1=l_2=r$. Forța aplicată $F_1$ este egală cu sarcina $F_2$, iar starea de echilibru este:
Bloc fix folosit atunci când trebuie să schimbați direcția unei forțe fără a-i modifica magnitudinea.
Bloc mobil
Blocul mobil acționează similar unei pârghii, ale cărei brațe sunt: $l_2=(l_1)/(2)=r$. În acest caz, starea de echilibru are forma:
unde $F_1$ este forța aplicată, $F_2$ este sarcina. Utilizarea unui bloc mobil oferă un câștig în forță de două ori.
Polyspast (sistem de blocuri)

Un palan obișnuit cu lanț este format din $n$ blocuri mobile și $n$ blocuri fixe. Aplicarea acestuia oferă un câștig în putere de 2n$ de ori:
$F_1=(F_2)/(2n)$
Palan cu lanț electric constă din n bloc mobil și un bloc fix. Utilizarea unui palan cu lanț oferă un câștig în putere de $2^n$ ori:
$F_1=(F_2)/(2^n)$

Şurub
Șurubul este un plan înclinat înfășurat pe axă.
Condiția pentru echilibrarea forțelor care acționează asupra șurubului are forma:
$F_1=(F_2h)/(2πr)=F_2tgα, F_1=(F_2h)/(2πR)$

unde $F_1$ este o forță externă aplicată șurubului și care acționează la o distanță $R$ de axa acestuia; $F_2$ este forța care acționează în direcția axei șurubului; $h$ - pasul șurubului; $r$ este raza medie a firului; $α$ este unghiul firului. $R$ este lungimea pârghiei (cheii) care rotește șurubul cu forța $F_1$.
Eficienţă
Coeficientul de performanță (COP) - raportul dintre munca utilă și toată munca cheltuită.
Eficiența este adesea exprimată ca procent și notat Literă greacă$η$ ("acesta"):
$η=(A_p)/(A_3) 100%$
unde $A_p$ este muncă utilă, $A_3$ este toată munca cheltuită.
Munca utilă este întotdeauna doar o parte din munca totală pe care o cheltuiește o persoană utilizând acest sau acel mecanism.
O parte din munca depusă este cheltuită pentru depășirea forțelor de frecare. Deoarece $А_3 > А_п$, eficiența este întotdeauna mai mică de $1$ (sau $< 100%$).
Deoarece fiecare dintre lucrările din această ecuație poate fi exprimată ca produsul dintre forța corespunzătoare și distanța parcursă, ea poate fi rescrisă după cum urmează: $F_1s_1≈F_2s_2$.
De aici rezultă că, câștigând cu ajutorul mecanismului în vigoare, pierdem același număr de ori pe parcurs și invers. Această lege se numește regula de aur a mecanicii.
Regula de aur a mecanicii este o lege aproximativă, deoarece nu ia în considerare munca de depășire a frecării și gravitației pieselor dispozitivelor utilizate. Cu toate acestea, poate fi foarte util atunci când se analizează funcționarea oricărui mecanism simplu.

Deci, de exemplu, datorită acestei reguli, putem spune imediat că muncitorul prezentat în figură, cu un câștig dublu în forța de ridicare de $10$ cm, va trebui să coboare capătul opus al pârghiei cu $20$ cm.
Ciocnirea corpurilor. Impacturi elastice și inelastice
Legile conservării impulsului și energiei mecanice sunt folosite pentru a rezolva problema mișcării corpurilor după o coliziune: momentele și energiile cunoscute înainte de ciocnire sunt folosite pentru a determina valorile acestor mărimi după ciocnire. Luați în considerare cazurile de impact elastic și inelastic.
Se numește impact absolut inelastic, după care corpurile formează un singur corp care se mișcă cu o anumită viteză. Problema vitezei acestuia din urmă se rezolvă folosind legea conservării impulsului pentru un sistem de corpuri cu mase $m_1$ și $m_2$ (dacă vorbim de două corpuri) înainte și după impact:
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=(m_1+m_2)υ↖(→)$
În mod evident, energia cinetică a corpurilor nu este conservată în timpul unui impact inelastic (de exemplu, la $(υ_1)↖(→)=-(υ_2)↖(→)$ și $m_1=m_2$ devine egală cu zero după impact).
Se numește impact absolut elastic, în care nu se păstrează doar suma impulsurilor, ci și suma energiilor cinetice ale corpurilor care se ciocnesc.
Pentru un impact absolut elastic, ecuațiile
$m_1(υ_1)↖(→)+m_2(υ_2)↖(→)=m_1(υ"_1)↖(→)+m_2(υ"_2)↖(→);$
$(m_(1)υ_1^2)/(2)+(m_(2)υ_2^2)/(2)=(m_1(υ"_1)^2)/(2)+(m_2(υ"_2) )^2)/(2)$
unde $m_1, m_2$ sunt masele bilelor, $υ_1, υ_2$ sunt vitezele bilelor înainte de impact, $υ"_1, υ"_2$ sunt vitezele bilelor după impact.
Problemele cu corpurile în mișcare în fizică, când viteza este mult mai mică decât viteza luminii, sunt rezolvate folosind legile newtoniene sau mecanicii clasice. În ea, unul dintre conceptele importante este impulsul. Elementele de bază ale fizicii sunt prezentate în acest articol.
Elan sau elan?
Înainte de a da formulele pentru impulsul unui corp în fizică, să ne familiarizăm cu acest concept. Pentru prima dată, o cantitate numită impeto (impuls) a fost folosită de Galileo în descrierea lucrărilor sale la începutul secolului al XVII-lea. Ulterior, Isaac Newton a folosit un alt nume pentru el - motus (mișcare). Deoarece figura lui Newton a avut o influență mai mare asupra dezvoltării fizicii clasice decât personalitatea lui Galileo, inițial era obișnuit să se vorbească nu despre impulsul corpului, ci despre cantitatea de mișcare.
Mărimea mișcării este înțeleasă ca produsul dintre viteza de mișcare a corpului prin coeficientul de inerție, adică prin masă. Formula corespunzătoare arată astfel:
Aici p¯ este un vector a cărui direcție este aceeași cu v¯, dar modulul este de m ori mai mare decât modulul lui v¯.
Modificarea p¯

Conceptul de impuls este utilizat în prezent mai puțin frecvent decât impuls. Și acest fapt este legat direct de legile mecanicii newtoniene. Să o scriem în forma care este dată în manualele școlare de fizică:
Înlocuim accelerația a¯ cu expresia corespunzătoare pentru derivata vitezei, obținem:
Transferând dt de la numitorul părții drepte a egalității la numărătorul din stânga, obținem:
Am obținut un rezultat interesant: pe lângă faptul că forța care acționează F¯ duce la accelerarea corpului (vezi prima formulă a acestui paragraf), modifică și impulsul corpului. Produsul forței și timp, care se află pe partea stângă, se numește impulsul forței. Se dovedește a fi egală cu modificarea p¯. Prin urmare, ultima expresie se mai numește și formula impulsului în fizică.
Rețineți că dp¯ este, de asemenea, dar spre deosebire de p¯, este direcționat nu ca viteză v¯, ci ca forță F¯.
Un exemplu izbitor de schimbare a vectorului de impuls (momentum) este situația în care un jucător de fotbal lovește mingea. Înainte de impact, mingea s-a deplasat către jucător, după impact - departe de el.
Legea conservării impulsului
Formulele din fizică care descriu conservarea lui p¯ pot fi date în mai multe moduri. Înainte de a le scrie, să răspundem la întrebarea când se păstrează impulsul.
Să ne uităm la expresia din paragraful anterior:
Se spune că dacă suma forțelor externe care acționează asupra sistemului este egală cu zero (sistem închis, F¯= 0), atunci dp¯= 0, adică nu va avea loc nicio modificare a impulsului:
Această expresie este comună pentru impulsul unui corp și legea conservării impulsului în fizică. Notă doi momente importante, despre care ar trebui să știți pentru a aplica cu succes această expresie în practică:
- Momentul este conservat de-a lungul fiecărei coordonate, adică dacă înainte de un eveniment valoarea lui p x a sistemului era de 2 kg * m / s, atunci după acest eveniment va fi aceeași.
- Momentul este conservat indiferent de natura ciocnirilor corpurilor rigide din sistem. Sunt cunoscute două cazuri ideale de astfel de ciocniri: ciocniri absolut elastice și absolut plastice. În primul caz, energia cinetică este de asemenea conservată, în al doilea, o parte din ea este cheltuită pentru deformarea plastică a corpurilor, dar impulsul este încă păstrat.
Interacțiunea elastică și inelastică a două corpuri
Un caz special de utilizare a formulei impulsului în fizică și conservarea acesteia este mișcarea a două corpuri care se ciocnesc unul cu celălalt. Luați în considerare două cazuri fundamental diferite, care au fost menționate în paragraful de mai sus.

Dacă impactul este absolut elastic, adică transferul de impuls de la un corp la altul se realizează prin deformare elastică, atunci formula de conservare p se va scrie după cum urmează:
m 1 * v 1 + m 2 * v 2 = m 1 * u 1 + m 2 * u 2
Aici este important de reținut că semnul vitezei trebuie înlocuit ținând cont de direcția acesteia de-a lungul axei considerate (viteze opuse au semne diferite). Această formulă arată că în condiția unei stări inițiale cunoscute a sistemului (valori m 1 , v 1 , m 2 , v 2) în starea finală (după o coliziune) există două necunoscute (u 1 , u 2). ). Le puteți găsi dacă utilizați legea corespunzătoare de conservare a energiei cinetice:
m 1 *v 1 2 + m 2 *v 2 2 = m 1 *u 1 2 + m 2 *u 2 2
Dacă impactul este absolut inelastic sau plastic, atunci după ciocnire cele două corpuri încep să se miște ca un întreg. În acest caz, are loc expresia:
m 1 * v 1 + m 2 * v 2 \u003d (m 1 + m 2) * u
După cum puteți vedea, vorbim despre o singură necunoscută (u), așa că această egalitate este suficientă pentru a o determina.
Elanul unui corp în timpul mișcării într-un cerc

Tot ce s-a spus mai sus despre impuls se referă la deplasările liniare ale corpurilor. Cum să fii în caz de rotație a obiectelor în jurul unei axe? Pentru aceasta, în fizică a fost introdus un alt concept, care este similar cu un impuls liniar. Se numește momentul impulsului. Formula în fizică pentru aceasta ia următoarea formă:
Aici r¯ este un vector egal cu distanța de la axa de rotație la o particulă cu impuls p¯ care face mișcări circulareîn jurul acestei axe. Mărimea L¯ este de asemenea un vector, dar este ceva mai greu de calculat decât p¯, deoarece vorbim despre produs vectorial.
Legea conservării L¯
Formula pentru L¯ dată mai sus este definiția acestei cantități. În practică, ei preferă să folosească o expresie ușor diferită. Nu vom intra în detaliile obținerii acestuia (nu este dificil și fiecare poate să o facă singur), dar o vom oferi imediat:
Aici I este momentul de inerție (pentru un punct material este egal cu m * r 2), care descrie proprietățile inerțiale ale unui obiect în rotație, ω¯ este viteza unghiulară. După cum puteți vedea, această ecuație este similară ca formă cu cea pentru impulsul liniar p¯.
Dacă asupra sistemului rotativ nu acționează forțe externe (de fapt, momentul forțelor), atunci produsul dintre I și ω¯ se va păstra indiferent de procesele care au loc în interiorul sistemului. Adică, legea conservării pentru L¯ are forma:

Un exemplu de manifestare a acestuia este performanța sportivilor la patinaj artistic atunci când fac rotații pe gheață.
Momentum... Un concept destul de des folosit în fizică. Ce se înțelege prin acest termen? Dacă punem această întrebare unui simplu neprofesionist, în cele mai multe cazuri vom primi răspunsul că impulsul corpului este un anumit impact (împingere sau lovitură) exercitat asupra corpului, datorită căruia acesta are posibilitatea de a se mișca într-un anumit timp. direcţie. Una peste alta, o explicație destul de bună.
Elanul unui corp este o definiție pe care o întâlnim pentru prima dată la școală: într-o lecție de fizică, ni s-a arătat cum un cărucior mic s-a rostogolit pe o suprafață înclinată și a împins o minge de metal de pe masă. Atunci ne-am gândit ce ar putea afecta puterea și durata acestui lucru.Din astfel de observații și concluzii cu mulți ani în urmă, conceptul de impuls al corpului a luat naștere ca o caracteristică a mișcării, direct dependentă de viteza și masa obiectului. .
Termenul în sine a fost introdus în știință de francezul René Descartes. S-a întâmplat la începutul secolului al XVII-lea. Omul de știință a explicat impulsul corpului doar ca „cantitatea de mișcare”. După cum a spus însuși Descartes, dacă un corp în mișcare se ciocnește de altul, își pierde atât de mult din energie cât o dă altui obiect. Potențialul corpului, potrivit fizicianului, nu a dispărut nicăieri, ci a fost doar transferat de la un obiect la altul.
Principala caracteristică pe care o posedă impulsul unui corp este direcționalitatea acestuia. Cu alte cuvinte, se reprezintă pe sine. Prin urmare, o astfel de afirmație rezultă că orice corp în mișcare are un anumit impuls.

Formula pentru impactul unui obiect asupra altuia: p = mv, unde v este viteza corpului (valoarea vectorială), m este masa corpului.
Cu toate acestea, impulsul corpului nu este singura cantitate care determină mișcarea. De ce unele corpuri, spre deosebire de altele, nu o pierd mult timp?
Răspunsul la această întrebare a fost apariția unui alt concept - impulsul forței, care determină amploarea și durata impactului asupra obiectului. El este cel care ne permite să determinăm cum se schimbă impulsul corpului într-o anumită perioadă de timp. Impulsul forței este produsul dintre mărimea impactului (forța reală) și durata aplicării acestuia (timp).

Una dintre cele mai remarcabile caracteristici ale IT este păstrarea sa într-o formă neschimbată în condiția unui sistem închis. Cu alte cuvinte, în absența altor influențe asupra a două obiecte, impulsul corpului dintre ele va rămâne stabil pentru un timp arbitrar lung. Principiul conservării poate fi luat în considerare și într-o situație în care există un efect extern asupra obiectului, dar efectul său vectorial este 0. De asemenea, impulsul nu se va modifica chiar dacă efectul acestor forțe este nesemnificativ sau acționează asupra corp pentru o perioadă foarte scurtă de timp (cum ar fi, de exemplu, când împușcat).
Această lege a conservării îi bântuie pe inventatorii care s-au încurcat cu privire la crearea celebrei „mașini cu mișcare perpetuă” de sute de ani, deoarece tocmai această lege stă la baza unui astfel de concept precum
În ceea ce privește aplicarea cunoștințelor despre un astfel de fenomen precum impulsul corpului, ele sunt utilizate în dezvoltarea de rachete, arme și mecanisme noi, deși nu eterne.